Creating a map of minimum heights |


|
|
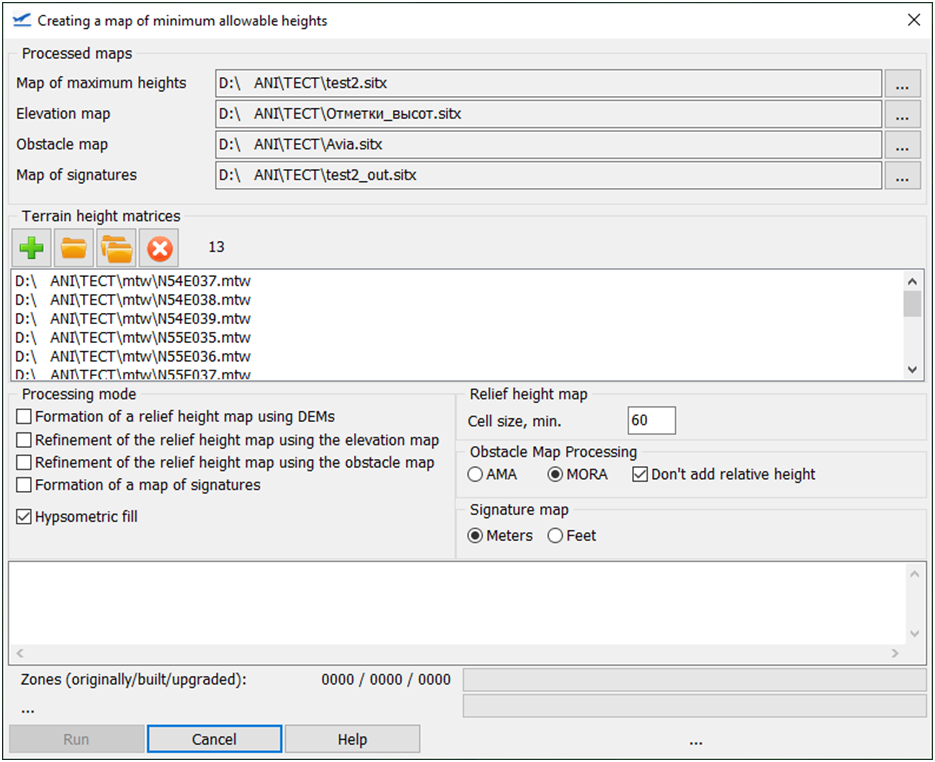
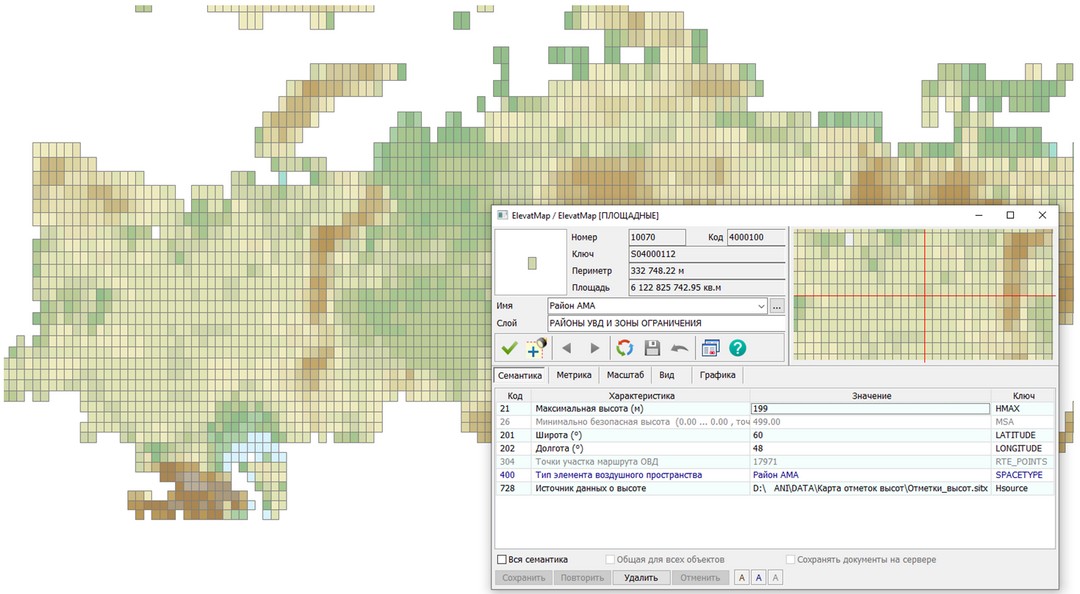
The procedure is designed to automatically generate a map of the minimum heights allowed for aviation flights based on terrain height matrices, elevation maps and artificial obstacle maps. Map of minimum heights is a matrix of signatures for the values of the minimum allowable flight heights in established conventional signs with a given size of the analyzed cells (usually 60’ x 60’). The height values can be calculated in meters or feet. In the semantics of the created objects (code 26), the value is always entered in meters. The process of constructing a map of minimum heights includes two stages: the formation of a map of maximum heights and the formation of signatures of minimum height values on the map of maximum heights. The map of maximum heights contains objects – areas of the size specified during its formation (as a rule, 60’ x 60’), having the following information in the attributive semantic description: • maximum defined absolute height; • the source of determining the maximum height (the file name of the height matrix or the elevation point map or the map of obstacles); • id of the elevation map object or obstacle map that influenced the determination of the maximum height on this section; • calculated minimum allowable flight height (taking into account the minimum height of the flight calculated by the type of terrain). The value of the minimum allowable flight height (characteristic code: 26) is further used to form signatures on the map of minimum heights. When forming a map of maximum heights, relief height matrices, elevation maps of extreme relief points and maps of artificial obstacles can be used. The processing of the source data can be performed in any sequence. However, it should be taken into account that the processing time of height matrices is much longer than the processing time of reference point maps and obstacle maps. In addition, elevation matrices and elevation maps can be considered conditionally unchanged over time, unlike artificial obstacle maps, which can be updated with a certain periodicity. In this regard, the following order of work is recommended: 1. Processing of available height matrices, formation of a base map of maximum heights. 2. Refinement of the map of maximum heights by processing (if available) the map of elevation marks. 3. Refinement of the map of maximum heights by processing (if available) the map of artificial obstacles; 4. Formation of a map of minimum heights (signature maps). After forming a map of the maximum heights according to the elevation matrices of the relief, it is placed in archival storage. In the future, when additional elevation matrices are received, this map is extracted from the archive and updated with data from newly received elevation matrices. After updating the base map of the maximum heights, it is again placed in archival storage. After that, it is refined with data from current elevation maps and maps of artificial obstacles. Elevation marks are point map objects with the attribute semantic characteristic «Absolute height» (semantics code: 4). Obstacles are map objects with attributive semantic characteristics: absolute (semantics code 4) and relative (semantics code 1) heights. If the relative height is 0 or the «Don't add relative height» option is enabled, it is assumed that the absolute height value contains the already calculated sum of the absolute and relative height of the object. Maps of elevation marks and artificial obstacles can be created using any classifier. The maximum height map and the signature map must be created using the dfc.rsc classifier. If you specify the name of a non–existent file when selecting a map of maximum heights, a new map will be generated. If you select an existing file, data refinement will be performed. During the processing of height matrices and additional maps, new objects will be formed for sections for which there is information about the height, but there are no objects on the map of maximum heights yet. If the objects already exist, they will be corrected if the newly calculated height is greater than the height already available in the attribute description of the object. In case of updating the elevation map or artificial obstacle map, the map of maximum heights is not updated with the changed additional maps. In this case, the base map of the maximum heights is extracted from the archive and refined due to the current map of elevation marks and obstacle maps. This is due to the fact that an object on the map of maximum heights is edited if the newly calculated height is greater than the height already available in the attribute description of the object. And if the obstacle map has changed due to the dismantling of the obstacle (previously the highest on the site), the map of maximum heights will not be changed. The calculation of the minimum height value for maximum height map objects is performed using the formula: Hmin = Max(h1, h2, h3) + dH, where: h1 - maximum absolute height on the site, calculated from the height matrixes, h2 is the maximum absolute height on the site from the elevation map, h3 is the maximum absolute height of the obstacle on the site, dH is the minimum height of flight. The minimum height of flight is calculated depending on the type of terrain on the area: At maximum absolute heights in the area up to 900 m, the minimum height of flight is 300 m, at heights from 900 to 1 500 m - 450 m, at heights over 1500 m - 600 m. In the case of data processing according to MORA rules, heights of terrain and points are analyzed strictly within the boundaries of the analyzed area. In the case of data processing according to the AMA rules, the inner region and the buffer zone at a distance of 8 km from the border of the region are analyzed. To improve the visual perception of the objects of the generated map of maximum heights, a hypsometric coloring can be added, depending on the value of the minimum allowable height.
|