Построение маршрутов прибытия |




|
|
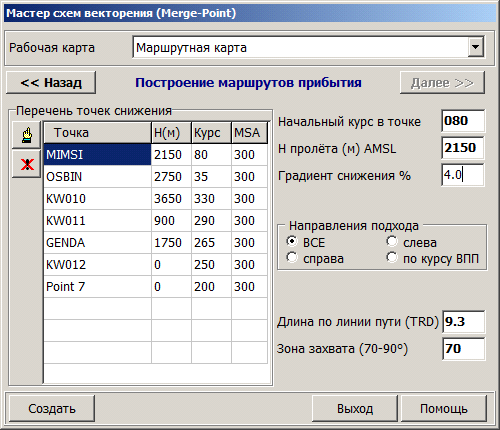
На этом этапе выполняется выбор точек или участков снижения с маршрутов ОВД и расчёт векторов осевой линии маршрутов прибытия. Выбор точек выполняется с любой маршрутной карты с нанесенной сетью маршрутов ОВД которая подключена к текущему набору карт кнопкой
Построение осевых линий векторения маршрутов прибытия
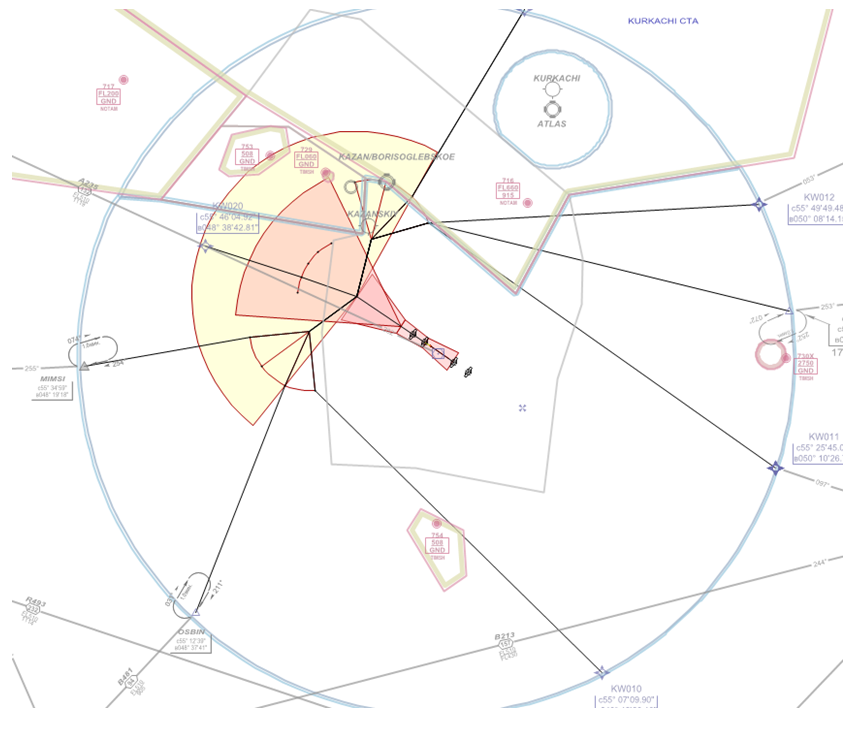
Флаги «Направление подхода» - служит для возможности выбора расчёта всей схемы или её части. При установке флагов «слева» и «справа» или «по курсу ВПП» - все выбранные маршруты будут ориентированы на соответствующее направление относительно точки «IF». Если маршрут невозможно построить не пересекая продолжения оси ВПП, маршрут с такой точки не строится. Поле «Длина по линии пути (TRD)» - вводится в километрах и является кратчайшем расстоянием по линии пути на начальном этапе захода на посадку (см. Часть III Раздел 2 Глава 3 Doc 8168). Поле «Зона захвата (70-90)» - сектор зоны захвата (merge sector) курсоглиссадной системы посадки на начальном этапе. Согласно требованиям по векторению, угол разворота на посадочную прямую не должен превышать 90 градусов. Оптимальный угол 70 градусов, используется на Y образных схемах и позволяет осуществлять независимый заход на посадку по трём направлениям – прямому и двум боковым. Кнопка «Создать» - формирует оптимальные векторы осевой линии маршрутов прибытия на начальном этапе с указанных точек или участков маршрутов. Рассчитывается профиль каждого элемента по заданным параметрам. На рисунке ниже, показан пример рассчитанной схемы векторения на курс 11 аэродрома UWKD.
Результат построения векторения на начальном этапе прибытия
Следующим и заключительным этапом является создание карты минимально безопасных высот в районе. Переход выполняется с помощью кнопки «Далее >>»
|