Построение плана учёта препятствий на приаэродромной территории (OFZ) |




|
|
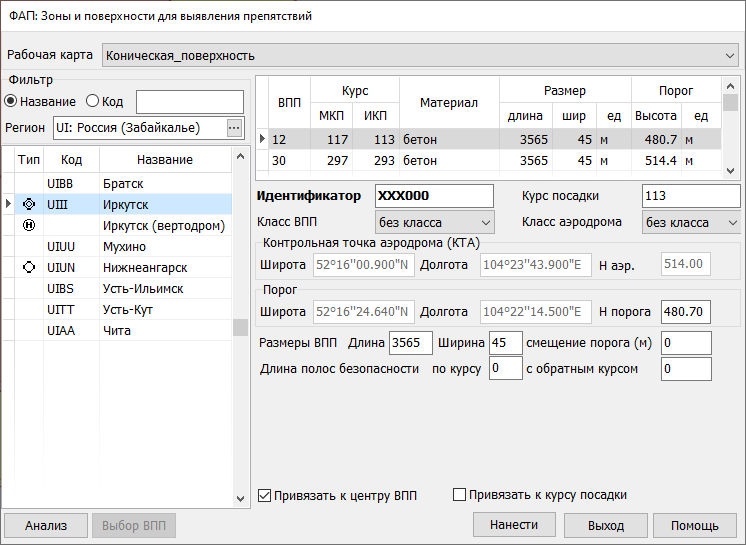
Безопасность и эффективность использования аэродрома в значительной степени зависит от искусственных и естественных объектов на аэродроме и его окрестностях. Они влияют на минимумы для взлета и посадки, взлетную массу воздушных судов, а также на маршруты полета в районе аэродрома. Анализ влияния препятствий выполняется в соответствии с пунктом 6 приложения 3.5 МОС ФАП. Результаты расчёта экспортируются в виде таблицы препятствий. Таблица препятствий описана в МОС ФАП в таблице 3.1 и содержит полный перечень объектов, которые будут обследованы и проанализированы на различных этапах формирования «Акта обследования препятствий». Исходные данные для обследования на район аэродрома готовятся оператором или геодезистом по результатам геодезических исследований местности. Для получения данных о препятствиях необходимо произвести топографическую съемку естественных и искусственных препятствий. Перед началом анализа и расчёта необходимо подготовить рабочую топографическую карту на район работ, создать матрицу высот и рабочую аэронавигационную карту. Порядок подготовки рабочего места описан в разделе 2 данного документа. Исследуемые объекты наносятся средствами комплекса, импортом с обменных форматов или вручную (интерактивно) в виде объектов классификатора - «препятствие». При нанесении вручную необходимо установить абсолютную высоту наивысшей точки объекта в его метрику и ввести текстовое наименование для отчёта в семантику номер 9 - «абсолютная высота». Поверхность строится в виде шаблона плана и наносится непосредственно на карту. Коэффициенты для плана устанавливаются в соответствии с классом ИВПП. Размер ИВПП, точка вставки и контрольная точка аэродрома указываются в форме нанесения зоны учёта и ограничения препятствий, которая может принимать один из двух видов в зависимости от подключения к базе данных. В режиме работы с подключением к базе данных форма принимает вид (см. рисунок ниже). В левой части размещена таблица аэродромов с фильтром по наименованию, коду и региону. Перед началом работы следует выбрать нужный регион ИКАО в фильтре аэродрома и исследуемый аэродром. Необходимая информация об аэродроме переносится из базы данных в редактируемые поля, а при её отсутствии поля заполняются вручную. В верхней части размещено поле с выбором рабочей карты. На рабочую карту наносится текущий план. В левой части формы размещена таблица аэродромов с фильтром по наименованию, коду и региону ИКАО.
Форма нанесения зоны учёта препятсвий с подключенной базой данных:
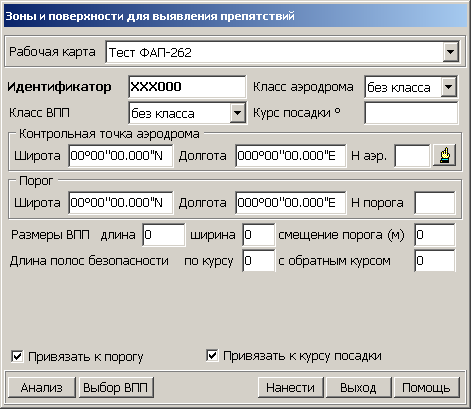
Поле «Идентификатор» - служит для произвольной текстовой маркировки поверхностей плана. Текстовый маркер устанавливается оператором и служит в качестве индикатора для различия планов при нанесении в многополосном аэродроме, а также для поиска при анализе влияния препятствий. Поле «Класс аэродрома» - предназначен для выбора исследуемого класса аэродрома. По умолчанию класс переносится из базы данных и не имеет обратной связи с базой данных. Поле «ВПП» - предназначено для выбора исследуемого класса взлётно-посадочной полосы. Поле автоматически заполняется при выборе другого аэродрома и не имеет обратной связи с базой данных. Поле «Курс посадки» - предназначено для установки значения истинного курса посадки аэродрома. Значение поля автоматически заполняется при выборе другого курса и не имеет обратной связи с базой данных. В автономном режиме работы с отключенной базой данных форма имеет такой же вид, за исключением таблицы выбора аэродрома и курсов посадки (см. рисунок ниже по тексту). Поле «Контрольная точка аэродрома» - предназначена для установки широты, долготы и высоты аэродрома вручную или автоматически. Автоматическая установка значений выполняется только в режиме с подключённой базой данных, а значения широты долготы и высоты не подлежат ручной коррекции. В автономном режиме поля доступны для коррекции.
Форма нанесения зоны учёта препятствий с подключенной базой данных:
Поле «Порог» - предназначено для установки широты, долготы и высоты исследуемого порога ВПП. В режиме с подключённой базой данных информация о метрике порога переносится из базы данных без обратной связи. Координата порога служит началом координат для нанесения плана, высота – смещением плана по вертикали, а истинный курс – направлением оси «Х». Ниже располагаются поля, содержащие метрическую и другую информацию для расчёта параметров создаваемого плана. Поле «Размеры ВПП (м)» - длина и ширина искусственной поверхности ВПП, участвующей при расчёте плана.
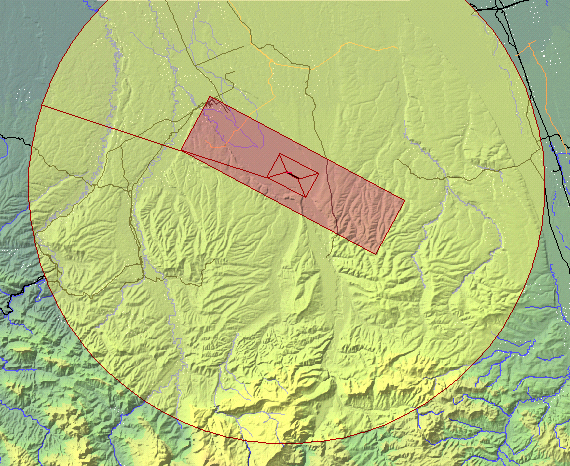
Поле «Смешение порога» - служит для установки начала системы координат для смещённых порогов ВПП относительно координаты, указанной в поле «Порог» в направлении, указанном в поле «курс посадки». Поле «Длина полос безопасности (м)» - длина концевых полос безопасности в метрах вдоль продолжения оси ВПП. В нижней части формы два флага: «Привязать к порогу» и «Привязать к курсу посадки». Кнопка «Выбор ВПП» - предназначена для выбора объекта карты в качестве оси ВПП. Выбираемый объект должен соответствовать следующим условиям: - объект должен быть линейным с тремя точками. Две крайние точки - пороги, первая - основной порог, третья - обратный порог, центральная - КТА; - объект должен быть на рабочей карте; - объект должен содержать высоты в метрике. Высота первой и второй точек считаются превышениями порогов, а второй - высотой аэродрома. На рисунке отображен план учёта препятствий аэродрома на карте. Жёлтым цветом отображена внешняя горизонтальная поверхность. Внешняя горизонтальная поверхность распространяется до максимальной границы учёт препятствий на аэродроме на дальности 15 км от КТА. Для аэродромов с двумя и более ИВПП внешняя горизонтальная поверхность заменяется внутренней горизонтальной и конической поверхностями.
Поверхность учёта препятствий в районе аэродрома:
Кнопка «Анализ» вызывает форму поиска и анализа планов на карте с признаком «план ограничения и учёта препятствий». Результатом анализа является отчёт в виде таблицы препятствий (таблица 3.1 документа МОС ФАП). |